
Data Soup
This is a summary of Unsupervised learning by competing hidden units.
This paper introduces a novel unsupervised learning technique. There’s (almost) no backprop and the model isn’t trained for a particular task. The two authors, coming from neuroscience and computer science backgrounds based this work on two biological observations:
1- Synapses changes are local:
In biology, the synapse update depends on the activities of the presynaptic cell and the postsynaptic cell and perhaps on some global variables such as how well the task was carried out. (page 1)
The weight of a cell between A and B trained with backpropagation not only depends on the activity of A and B but also on the previous layer’s activity and the training labels. So it doesn’t depend on A, B activity but other potentially any other neurons in the network. This is inspired by Hebb‘s idea.
2- Animals learn without labeled data and fewer data than neural networks trained with backpropagation:
Second, higher animals require extensive sensory experience to tune the early […] visual system into an adult system. This experience is believed to be predominantly observational, with few or no labels, so that there is no explicit task. (page 1)
Authors managed to train their model on MNIST and CIFAR-10 with only forward passes, meaning:
The blue rectangles are the authors “biological learning algorithm”. First, the data is going through it, without any label or any indication on the task it’ll be used for. Once trained a fully connected network is appended on top of it in order to specialize the model and make the desired predictions. This part is trained using backpropagation.
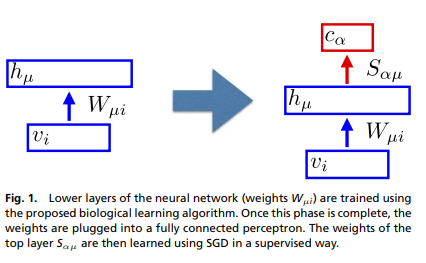
Usually to compute the activity of the hidden layer hμ, we project the input vi on it by multiplying it with a matrix Wμi and then apply non-linearity. In this new technique the hμ activity is computed solving this differential equation:

μ is the index of the hidden layer we want to updateτ is a timescale of the processIμ is the input currentr is a ReLU and winh is a hyperparameter constant.Since training is local and requires only forward passes, this architecture is different from an auto-encoder.
In an experiment on MNIST and CIFAR-10, the authors trained 2000 hidden units using their biological technique to find the matrix Wμi:
The training error on MNIST can be seen in the rightmost figure of the image below (BP stands for backpropagation and BIO for the proposed approach). We can see that despite a higher training error, the testing error is very close to the model trained end-to-end.
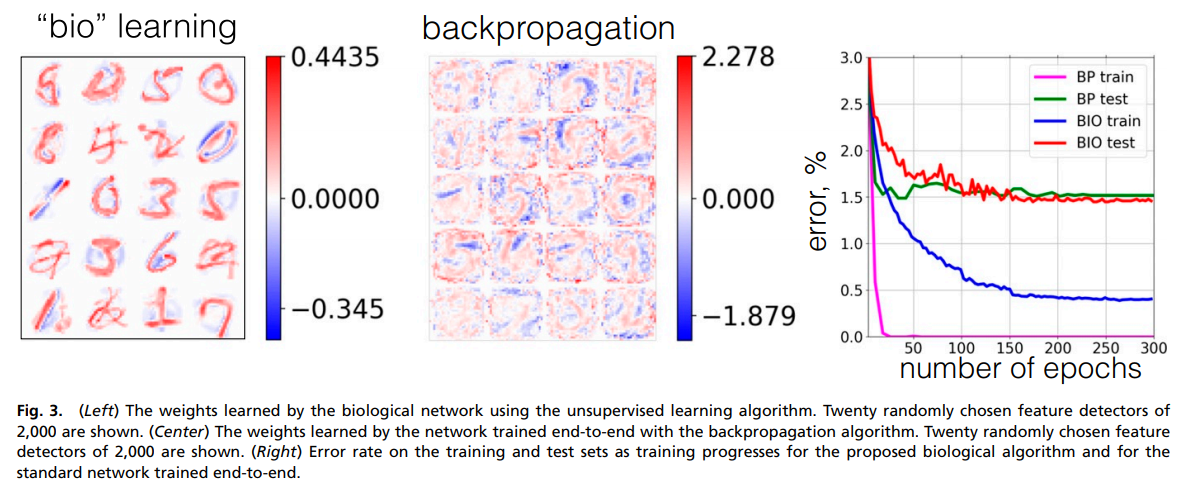
On MNIST, we can see that the features learned by the proposed biological learning algorithm (left figure) are different from the one trained with backpropagation (middle figure).
the network learns a distributed representation of the data over multiple hidden units. This representation, however, is very different from the representation learned by the network trained end-to-end, as is clear from comparison of Fig. 3, Left and Center.
Similarly for CIFAR-10:
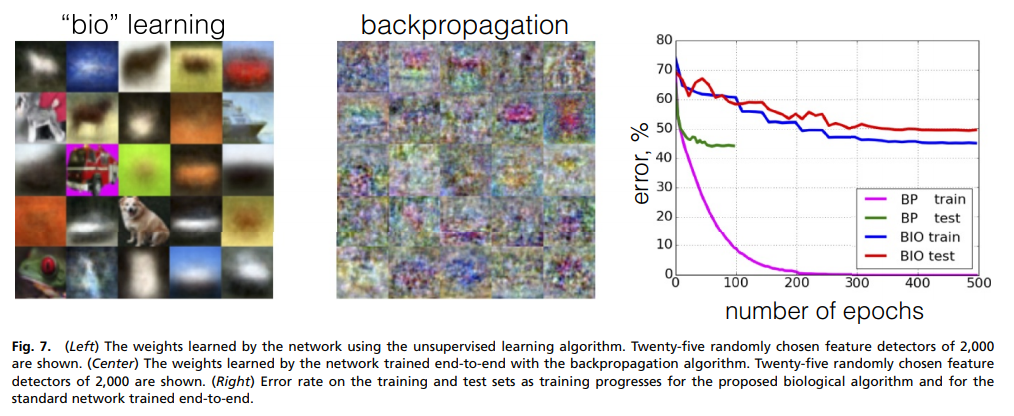
no top–down propagation of information, the synaptic weights are learned using only bottom-up signals, and the algorithm is agnostic about the task that the network will have to solve eventually in the top layer (page 8)
| Author | Organization | Previous work |
|---|---|---|
| Dmitry Krotov | MIT, IBM (Watson, Research), Princeton | Dense Associative Memory Is Robust to Adversarial Inputs |
| John J. Hopfield | Princeton Neuroscience Institute | same |
Complementary resources: